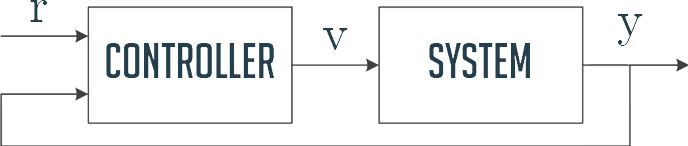
Classic Control-Feedback Problem
Controller takes target value $r(t)$ and feedback $y(t)$ and produces system input $v(t)$. System generates new output $y(t)$, which is used as a feedback.
Controller takes target value $r(t)$ and feedback $y(t)$ and produces system input $v(t)$. System generates new output $y(t)$, which is used as a feedback.
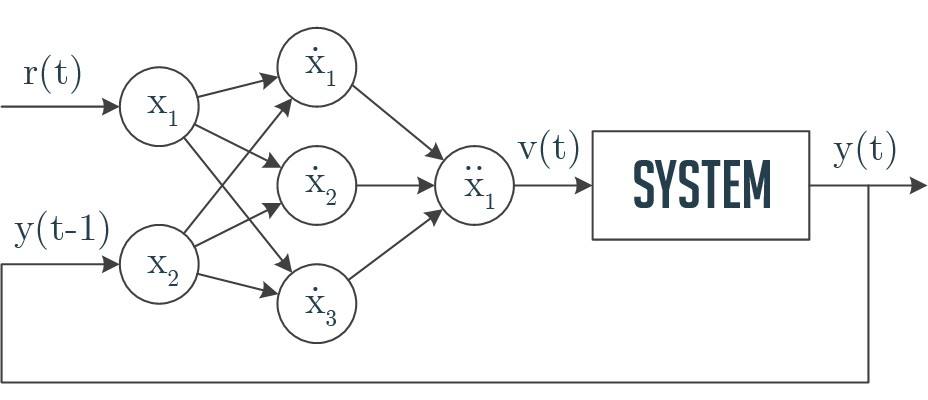
Controller based on a neural network with 2-3-1 structure
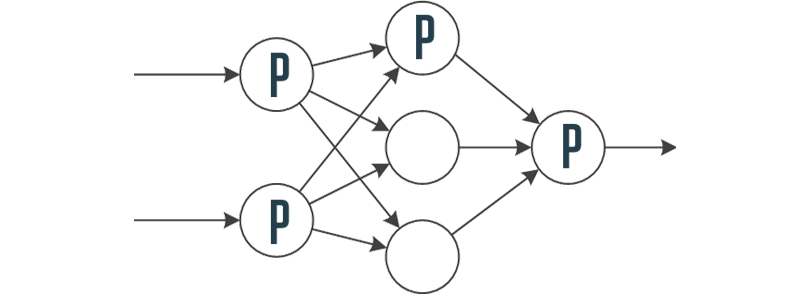 P-neuron transfer function: $$ x(t) = \begin{cases} -1 & u(t) < -1 \\ u(t) & -1 \le u(t) \le
1 \\ 1 & u(t) > 1 \end{cases}$$ $u(t)$ — neuron input, $x(t)$ — neuron output
P-neuron transfer function: $$ x(t) = \begin{cases} -1 & u(t) < -1 \\ u(t) & -1 \le u(t) \le
1 \\ 1 & u(t) > 1 \end{cases}$$ $u(t)$ — neuron input, $x(t)$ — neuron output
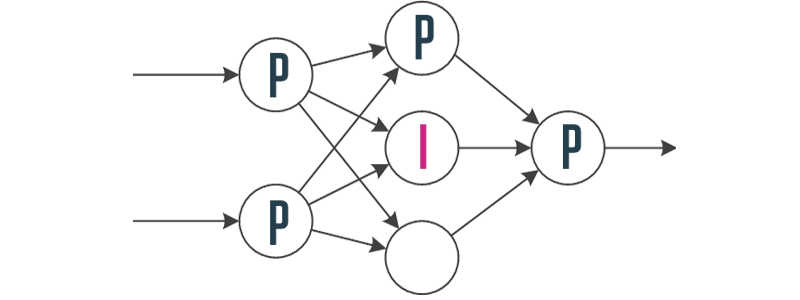 I-neuron transfer function: $$ x(t) = \begin{cases} -1 & x(t) < -1 \\ x(t-1)+u(t) & -1 \le
x(t) \le 1 \\ 1 & x(t) > 1 \end{cases}$$ $x(t-1)$ — previous output
I-neuron transfer function: $$ x(t) = \begin{cases} -1 & x(t) < -1 \\ x(t-1)+u(t) & -1 \le
x(t) \le 1 \\ 1 & x(t) > 1 \end{cases}$$ $x(t-1)$ — previous output
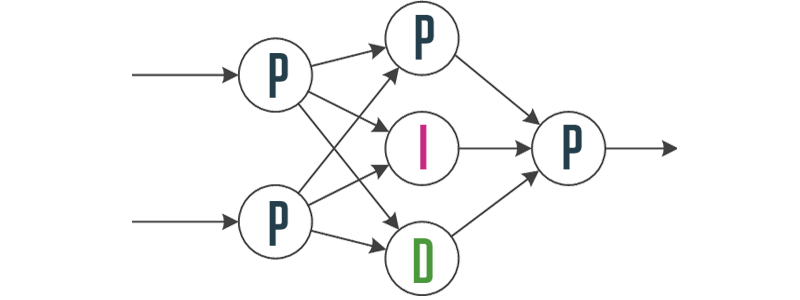 D-neuron transfer function: $$ x(t) = \begin{cases} -1 & x(t) < -1 \\ u(t)-u(t-1) & -1 \le
x(t) \le 1 \\ 1 & x(t) > 1 \end{cases}$$ $u(t-1)$ — previous input
D-neuron transfer function: $$ x(t) = \begin{cases} -1 & x(t) < -1 \\ u(t)-u(t-1) & -1 \le
x(t) \le 1 \\ 1 & x(t) > 1 \end{cases}$$ $u(t-1)$ — previous input
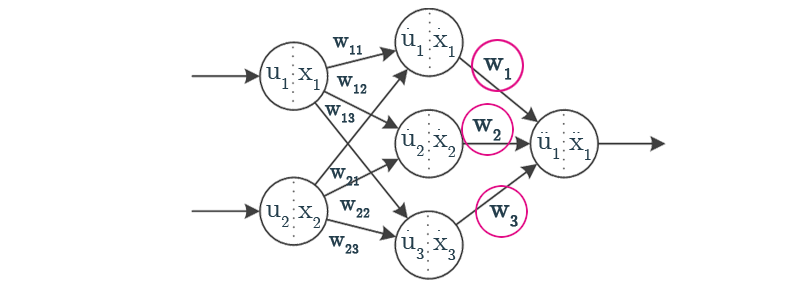 $$ w_i(n+1) = w_i(n) - \eta \frac{\partial J}{\partial w_i}$$
$$ w_i(n+1) = w_i(n) - \eta \frac{\partial J}{\partial w_i}$$
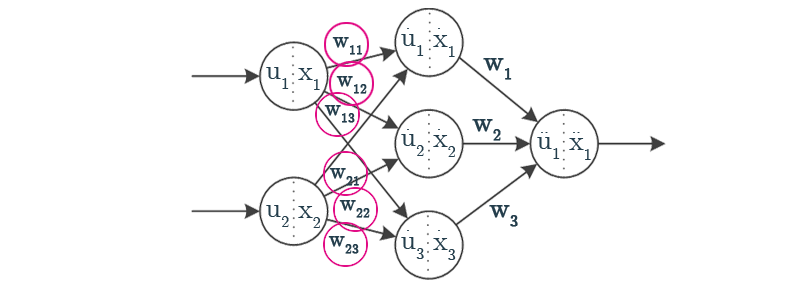 $$ w_{ij}(n+1) = w_{ij}(n) - \eta \frac{\partial J}{\partial w_{ij}}$$
$$ w_{ij}(n+1) = w_{ij}(n) - \eta \frac{\partial J}{\partial w_{ij}}$$
/
#